
Streamlining End-of-Line Operations for a Health Care Facility
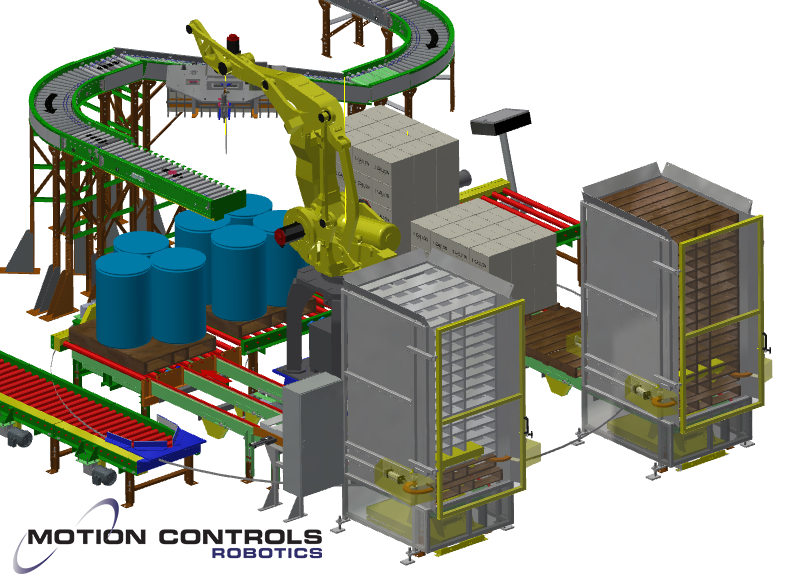
In this case study, a healthcare industry client required an end-of-line solution capable of palletizing two different sizes of cases and two sizes of drums within a single robotic cell. Motion Controls Robotics addressed this need by implementing a FANUC M-410iC/500 robot equipped with versatile end-of-arm tooling (EOAT) designed to handle both cases and drums. The system features two automatic pallet dispensers and utilizes an elevated conveyor for case handling, allowing the robot to pick multiple cases simultaneously based on the selected pallet pattern. Drums are introduced via a separate conveyor, with the robot placing each drum individually onto the pallet. Once a pallet is fully loaded, it is conveyed to a stretch wrapper for final processing. This integrated solution streamlines the palletizing process for multiple product types, enhancing operational efficiency.
![]()
Customer Challenges – Case and Drum Palletizing
Our health care industry customer needed an end of line solution to handle a variety of product palletizing options in the same cell. Their product was packaged into 2 different size cases or for bulk needs the product filled 2 different size drum orders. This made for a total of 4 different sizes that needed to be palletized in the same area of the facility.

Addressing the Challenges – Case and Drum Palletizing
To meet the needs of the products that are palletized in this robotic cell, there are two automatic pallet dispensers that send pallets to the building station. The FANUC M-410iC/500 was selected to handle the weight of the products and the rate needed in the system. The same robot EOAT (end of arm tooling) is designed to pick cases and drums.
The setup of the system has to be done by a trained operator. The operator must use the correct size pallet from the pallet dispenser and proper pattern placement for the product being palletized. Passwords are used on the system to make sure that only the trained operator can access the pallet dispenser and product setup on the HMI.
Cases enter the robot cell on an elevated conveyor and are positioned to account for accumulation without creating jamming. Cases are picked in rows based on pallet pattern (2 or 4 cases at a time). Once a pallet is full, it leaves the cell and moves to the pallet wrapper.
Drums enter the cell in a separate location on a conveyor. The robot picks and places one barrel at a time onto the pallet load station. Once a pallet is full, it leaves the cell on the same line as the cases, and moves to the pallet wrapper.
Video shows Case and Drum Palletizing Cell in Action
![]()
Sequence of Operations for Case and Drum Palletizing
Case Palletizing:
-
- To start the system the operator needs to fill the pallet dispenser with case pallets and then, using the HMI, select the cased product being run.
- Cases start to convey up the conveyor to the robot pick location. The M-410iC robot moves to the conveyor to pick either 2 or 4 cases depending on the selected product.
- The M-410iC robot moves over to the pallet on the place conveyor and palletizes the first row of cases using the programmed pallet pattern.
- The pick and place sequence will repeat until a pallet has reached its programmed stack height.
- At this point, the finished pallet conveys out of the cell on an out-feed conveyor and on to a stretch wrapper.
Drum Palletizing:
- Moving over to the drum palletizing, the operator also adds the correct pallets to the pallet dispenser. Then moves to the HMI to select the current product being run – there are two different sizes of drum that this system is programmed to palletize.
- A pallet is dispensed to the drum line.
- The drums convey into the robot cell where the FANUC M-410iC swings the arm over to the drum pick area while cases gather on the conveyor. The robot picks one drum and places the drum on the pallet.
- The pick and place sequence repeats until there are 4 drums on the pallet.
- The finished pallet will convey out of the cell on the out-feed conveyor and be moved on to the stretch wrapper.


Robot and End of Arm Tooling
FANUC M410s are a popular robot for palletizing. While there are many models available in the series, this robot cell needed to move heavy payloads. So the FANUC M-410iC/500 robot, the second largest model in the series, was selected.
The mechanical EOAT was designed to be able to pick both a row of cases and then move over to the drums and use a gripper to pick the drums.
✓ Safety Features
Motion Controls Robotics follows the ANSI/RIA R15.06-2012 Safety Standard designed to ensure employees and robots work safely together. We take full advantage of new safety technologies and innovations as they become available. This system is complete with safety fencing and sensors. There are times when the operators need to enter the area to work. Safety sensors ensure the robot will not run until all workers have left the cell.
![]()
Customer Results
The robot cell was installed at the facility and the company is happy with the improved productivity. They have returned to MCRI with other projects to bring similar efficiency to other processes.



