In this Tech Talk How to Robot Series article we are going to go through the steps to take when you want to jog the robot.
In a robot system you may need to jog the robot if:
- the robot is in an unexpected position.
- the robot position needs to be moved for maintenance and/or PM.
- programming to teach points and test motion.
The controller keyswitch needs to be in either T1 or T2 instead of AUTO. If the controller key is turned to teach mode after the DEADMAN switch is held in then the robot will have a fault. When jogging the robot all safety systems must be green, and all faults must be clear.
- Start with the COORD KEY pressing to toggle through the coordinate system you would like to use. The display for the COORDINATE SYSTEM is found in the Upper Right corner of the teach pendant.
The options for this include:
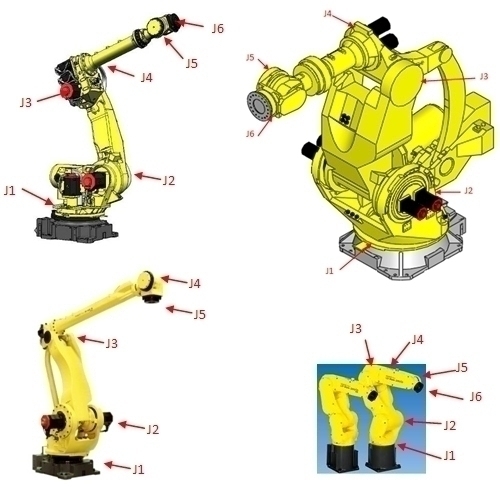
- Joint – select this coordinate system to jog each joint individually or at the same time.
- S/World – moves the robot TCP in the x, y, or z directions and rotates about x (w), y (p), or z (r).
- S/Tool – moves the robot TCP in the x, y, or z direction and rotates x(w), y(p), and z(r) in the selected tool frame.
For our example, we jogged in the Joint System, so that we could show moving each Joint separately.
- The jog speed is shown in the green box at the top right on the teach pendant screen – the jog speed defaults to 10%.
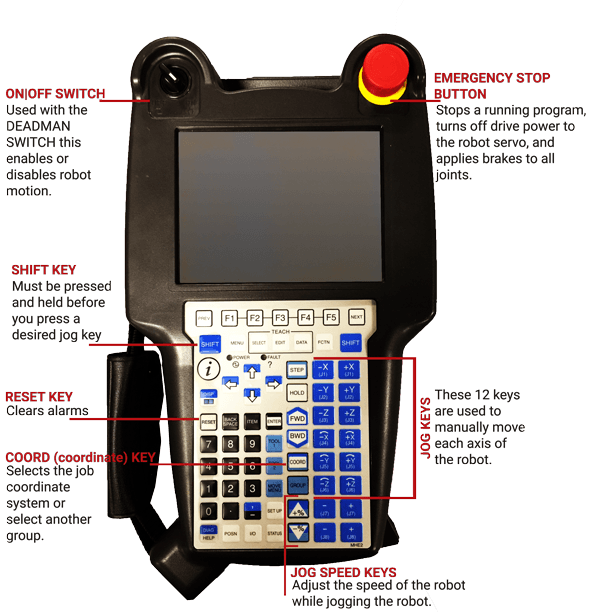
- Turn the ON/OFF SWITCH to ON
- From this point press the DEADMAN switch on the back of the teach pendant until you hear/feel one click, and hold throughout the jogging process.
- You will notice that the DEADMAN Switch has three positions: unclicked, one click, and two clicks. You need to listen or feel for the first click and hold the switch here. If you compress the DEADMAN Switch to two clicks (fully), the robot will not move and there will be an error. To clear this error, completely release the DEADMAN Switch, press in again for one click and press the RESET button.
- To change the jog speed, press the -% or +% button and the speed changes by percent, you can watch the speed increase/decrease in the green speed box at the top right.

-
- Now you are ready to start moving the robot at each joint, press and hold the SHIFT key as you use the JOG KEYS to move each joint to the needed position. You can move each joint into position by selecting the direction and joint key and holding the key down until the joint is in position.
- What happens if you get a Fanuc Robot Alarm JOG-007? This means that you stopped holding down the SHIFT key will moving the robot with the JOG Keys. Simply stop moving the robot with the JOG keys and press and hold the SHIFT Key. Then continue moving robot to desired position.
- What if you get a “In singularity” error? You need to Jog Joint J5 +/- at least 10 degrees.
*If you need to quickly stop robot movement, release the DEADMAN Switch
- Once you finish jogging the robot, you can select Auto HOME button to return the robot to position and beginning cycling.