The right bin picking strategy starts with one simple question:
how do your parts arrive at the robot? The more predictable the part presentation,
the simpler and faster the system. The less predictable it is, the more advanced the vision, tooling,
and robot strategy need to be.
Faster cycle times vs. more flexibility
Upstream effort vs. downstream complexity
When vision is simple and when it becomes critical
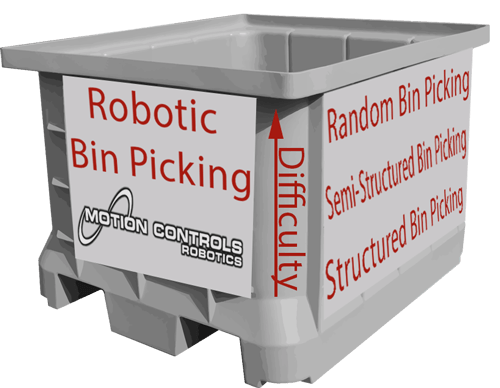
Three Levels of Bin Picking
As part presentation becomes less organized, the application becomes more complex. That changes the vision requirements, tooling strategy, and the expected cycle time.
Structured
Parts are placed in a repeatable, predictable pattern. This is usually the simplest and fastest robotic picking approach.
Lowest robot complexity
Often the fastest cycle times
Less need for advanced vision
More work required upstream
Semi-Structured
Parts have some organization or spacing, but not enough to make the application fully straightforward.
Moderate system complexity
May still need vision guidance
Balanced approach to cost and flexibility
Cycle times vary by part arrangement
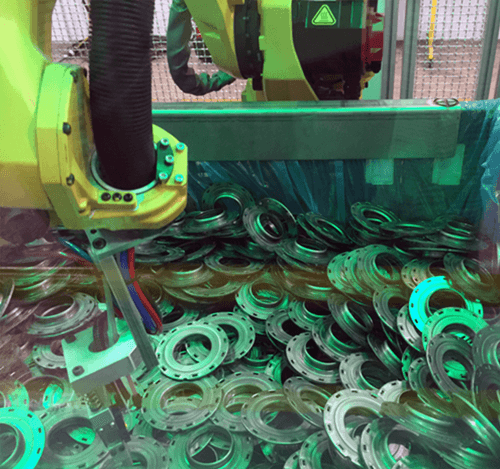
Random Bin Picking
Parts arrive in unpredictable positions and orientations. This is the most flexible approach, but also the most advanced.
Highest vision and tooling demands
Greater flexibility upstream
Longer cycle times than structured picking
Strong fit for bulk-loaded parts
Quick Comparison
This side-by-side view helps simplify the tradeoff: structured systems typically deliver speed, while random bin picking supports more variation and less upstream handling.
Factor
Structured
Semi-Structured
Random Bin Picking
Upstream Effort
High
Moderate
Low
Robot Complexity
Low
Moderate
High
Vision Requirement
Minimal or none
Application dependent
Advanced vision typically required
Cycle Time
Fastest
Varies
Typically longer
Flexibility
Lower
Moderate
Highest
Typical Cost Range
Lower
Mid-range
Higher
Bottom line: the less organized the incoming parts are, the more the application relies on advanced random bin picking vision and tooling strategies.
When Each Approach Makes Sense
Use Structured or Semi-Structured Picking When:
Throughput is critical
Parts can be layered, spaced, or fixtured upstream
You want to keep the application simpler
You want to reduce the need for advanced vision
Use Random Bin Picking When:
Parts arrive bulk loaded or dumped into containers
Orientation is unpredictable
Manual sorting is slowing down the process
The upstream process needs more flexibility
What Matters Here
How parts arrive at the robot often matters more than the robot itself.
Over-engineering a structured application can add cost without adding value.
Underestimating random bin picking can lead to poor performance and missed rate goals.
The best automation strategy usually starts upstream with part presentation.
Common Application Fit
Structured / Semi-Structured
Good fit for trays, dunnage, layered parts, organized totes, and applications where part location stays relatively predictable.
Random Bin Picking
Good fit for castings, forgings, bulk-loaded metal parts, and other applications where reducing manual sorting and handling creates value.
Not Sure Where Your Application Fits?
Whether your parts are layered, semi-organized, or completely bulk loaded, MCRI can help evaluate the right path for your random bin picking application.
ASRS – Transforming Industrial Efficiency Automated Storage and Retrieval Systems (ASRS) are at the forefront of revolutionizing storage facilities from…
To keep shelves stocked efficiently and create an eye-catching shopping experience, you need well-organized, stable, and display-ready pallets. MCRI’s automated…