Robotic case packing added to an existing single-line palletizing system to convert from wrapped product to case-packed bottles while maintaining production rate.
Watch the system in action (case erecting → packing → taping)
Industry
Food & Beverage
Goal
Convert to case-packed product
Rate Target
200 bottles/min
System Includes
Case erect + pack + seal + palletize
Robotic Case Packing Overview
Motion Controls Robotics updated an existing single-line palletizing system by reprogramming it to handle cases and adding a case packing robot at the front end.
We recently designed and installed a single line palletizing system for this customer. We described the single line robotic palletizer in a previous article where we showed a system for palletizing wrapped product.
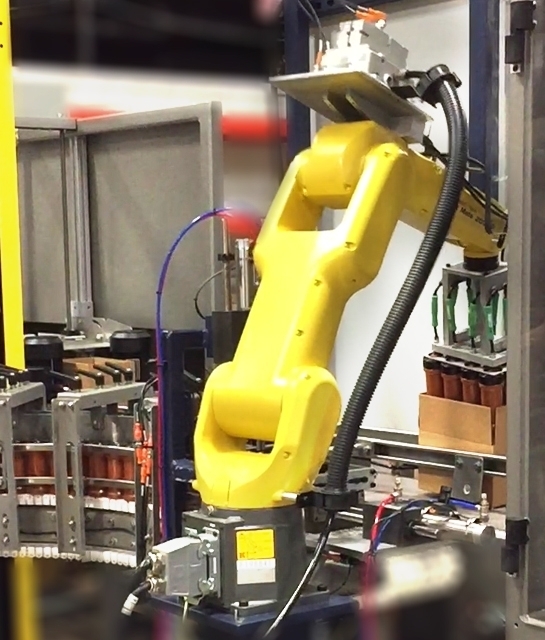
Case packing robot placing bottles into a case
Customer Challenge
Switch from wrapped product to case-packed product.
Maintain a consistent target rate of 200 bottles per minute.
Handle product weight variation (light spices vs. denser spices) without losing stability or throughput.
What mattered most
Change the packaging format without rebuilding the whole line and keep the rate.
Case Packing Process
Step-by-step line flow from case erecting to palletizing
⚙
1) Case erecting + bottom seal
Cases are pulled from the magazine, erected, and bottom-taped before packing begins.
⚙
2) Case travel + synchronization
Cases travel parallel to the bottle conveyor to maintain flow and timing alignment.
⚙
3) Bottle registration
Bottles enter a registration device so the robot can pick consistent groups.
⚙
4) Robot packs bottles into the case
The robot picks 12 bottles and places them diagonally to keep case flaps clear during loading.
Design detail:
Diagonal placement reduces flap interference and protects throughput.
⚙
5) Top sealing
Cases are sealed with a case sealer to tape the top flaps.
⚙
6–7) Convey + palletize
Sealed cases convey to the palletizer for robotic stacking by product.
Robot & End of Arm Tooling
The case packing robot selected was a FANUC LR Mate 200iD/7L for reach and speed. The EOAT was designed for the product’s lid size
and uses inline vacuum generation to pick and place bottles into cases.
Robot
LR Mate 200iD/7L
Reach
911 mm
Payload
7 kg
Design note
EOAT optimized for consistent picking and stable placement at speed without fighting the case flaps.
Safety Features
The system includes safety fencing and cell entry gates with safety interlock switches and follows A3/RIA guidance for safe robot operation.
Customer Results
Fully automated flow: erect → pack → seal → palletize.
Packaging format changed without rebuilding the line from scratch.
System designed to maintain rate target while managing product variability.
ASRS – Transforming Industrial Efficiency Automated Storage and Retrieval Systems (ASRS) are at the forefront of revolutionizing storage facilities from…
To keep shelves stocked efficiently and create an eye-catching shopping experience, you need well-organized, stable, and display-ready pallets. MCRI’s automated…