A Palletizing Machine-Dual M-Stack
As an advanced industrial automation palletizer, the Dual M-Stack delivers reliable, high-speed palletizing across two product lines. This system is…
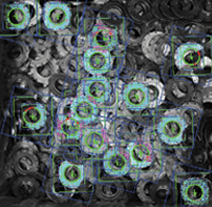
Read ArticleA successful random robotic bin picking system depends on more than vision alone. These three areas have a major impact on performance, reliability, and real-world production results.
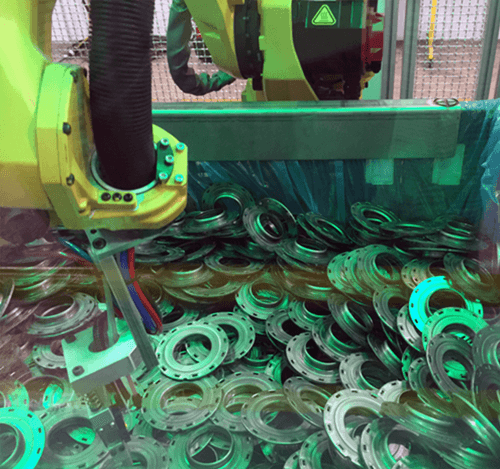
In 3D bin picking, the gripper is only part of the challenge. The robot arm, wrist, and tool all need enough room to move into and out of the bin without interference.
As bins get deeper or larger, clearance becomes more critical. The system needs to account for how the full robot arm approaches the part, not just whether the gripper can reach it.

It is important to plan around real production output, not ideal one-off picks. Bin picking rates should reflect missed picks, dropped parts, and the time needed to recover and continue.
Actual net efficiency depends on part presentation, gripper design, robot speed, scan time, and the full application setup.
Vision specs alone do not tell the full story. Accuracy is also affected by lighting, part surface, texture, part complexity, end-of-arm tool design, and how the robot approaches the pick.
In many applications, a secondary positioning step is still needed before the part is ready for the next operation, especially when downstream accuracy matters.