
This is the third of four articles covering the main types of grippers used in robotic applications. Remember that most times a custom designed EOAT will include multiple types of grippers to provide flexibility in the process.
Also in our gripper series:
Robotic End Effectors, Pneumatic or Servo Grippers, and other End of Arm Tooling (EOAT) are like the robot’s hands. They perform functions like material handling, pick & place, and machine loading/unloading.
Magnetic Grippers
Magnetic grippers come into play when the object being handled is made of ferrous material. Magnetic grippers can handle a variety of material sizes, grasp quickly, and allow easy grasping of a wide range of product shapes including items with holes. Considerations when using magnetic grippers include; items can slip slightly, dirt and grime can reduce lifting power, and metal particles (shavings) will also stick to gripper.
There are different types of magnetic grippers:
-
- Electro Magnetic – allow for simple grip release control but may have residual magnetism. Electromagnets can be designed to have more lifting power than rare earth magnets by increasing the coil size and electrical operating power (voltage x current).
- Rare Earth, Permanent Magnets – Mechanically (air actuation) move magnet away from the pick face or separate the poles of the magnet – no electrical control is need to operate the magnets. This is good for hazardous areas because there is no source for a spark from the magnet controls. They are also less expensive than electromagnets.
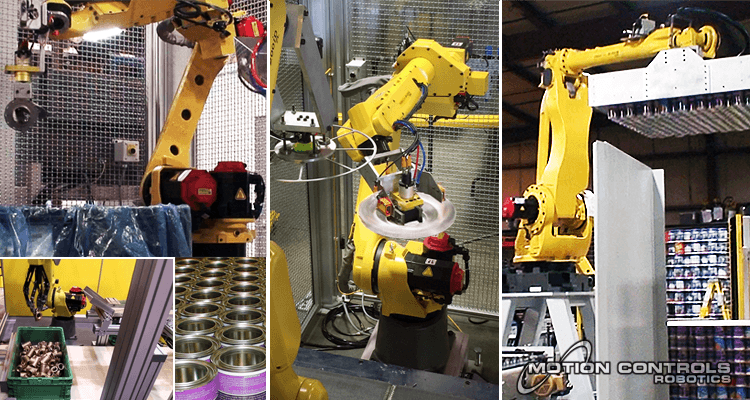
Magnetic grippers are used in a variety of industries where products or components contain ferrous metal. Latest applications of magnet grippers include material handling, palletizing, and bin picking of automobile parts and palletizing metal containers like paint and solvent cans and other steel containers.
Combination grippers
Custom designed EOATs can combine multiple gripper types to bring more flexibility and versatility to the robot’s functions. These are typically referred to as “multi-grippers”. This is shown in the above video of the bin picking cell which combines a magnetic gripper with a mechanical gripper.
Other examples include:
-
- Palletizing – pallet handling, slip sheet handling, top frame handling, and case handling tools are commonly combined into a single end of arm tool. Full layer handling tools can have multiple vacuum designs and air curtains to handle a wide range of products.
-
- Machine load/unload – in press load/unload applications, you will sometimes see one set of gripper fingers loading inserts into the press, and vacuum cups and/or another set of fingers removing finished parts from the press. A separate tool on the same robot may load inserts into the press at the beginning of the press cycle.
- Custom robotic work cells – basically, any time a robot has spare capacity, another set of grippers could be combined with a robot’s basic end of arm tool design to expand the use/utilization of the robot.
If you think that a custom designed magnetic gripper would help increase the efficiency of your process, contact Motion Controls Robotics for an evaluation. If you currently use a magnetic gripper in your robotic system, we would love to see and share your experience. Fill out our contact form and we will share on MCRI’s Facebook page.



