
A Palletizing Machine-Dual M-Stack
As an advanced industrial automation palletizer, the Dual M-Stack delivers reliable, high-speed palletizing across two product lines. This system is…
Read Article
From case packing to multi-lane palletizing, our end-of-line solutions are built for speed, precision, and durability. Designed to handle a wide range of products and packaging types.

Integrate AGVs, AMRs, and conveyor systems to keep product flowing efficiently between lines, palletizers, and shipping. Improve safety, reduce manual handling, and streamline production.
Improve the throughput, efficiency, and quality of the final stages of your production lines. Our end of line solutions get your products out the door faster, safer, and with minimum human errors for greater efficiency and customer satisfaction.
Here are several common programming methods used at Motion Controls Robotics:
Motion Controls Robotics recently received this question, “Outside of the teach pendant, what other methods are used to program robotic movements?
This article explores the essential insights into robot programming as we explain the pivotal role of experienced programmers. In the world of robotics, the old adage ‘you don’t know what you don’t know’ rings particularly true. Join us as we explore the critical nuances and expertise required in this dynamic field.
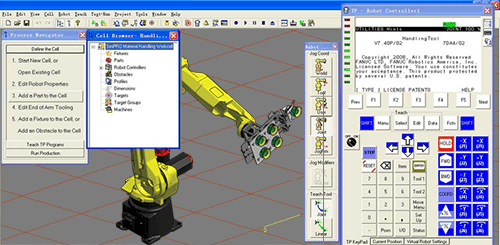
It is a typical sight on the MCRI design floor to see a Programmer positioning a robot in relation to other items in the system with a teach pendant. The teach pendant can be used to manually program points and move the robot almost like a remote control. Teaching a robot means programming precise positions (movement) and procedures. While this manual controller (teach pendant) is easy to spot and commonly used, there are a variety of other programming techniques that can also be used to program the robot’s positions.
Motion Controls Robotics is happy to answer any questions about robotics. Follow us on:
to read all our new Tech Talk articles.
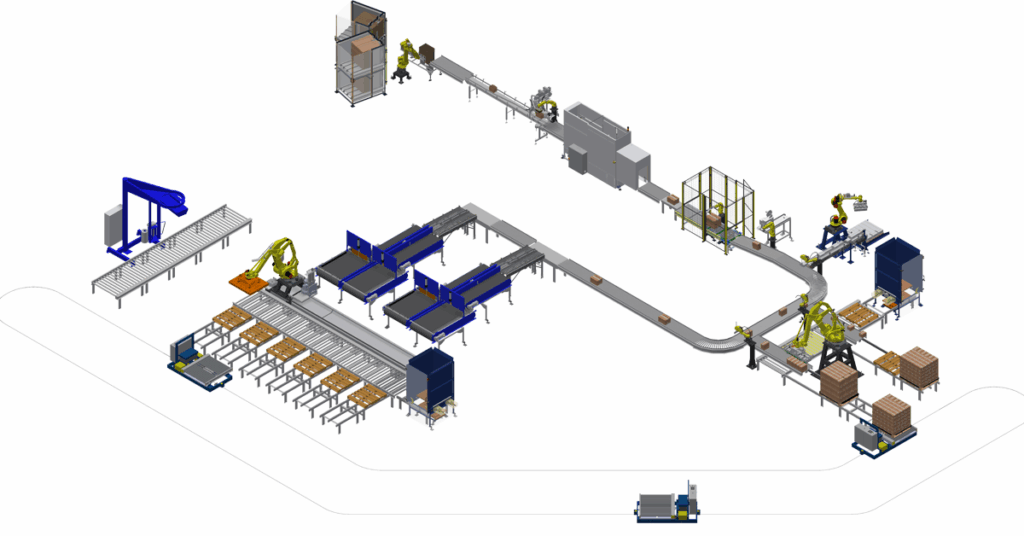
 Motion Controls Robotics uses a variety of robotic simulation software tools to help customers visualize systems and determine cycle times, cell layout and longevity estimations.
Motion Controls Robotics uses a variety of robotic simulation software tools to help customers visualize systems and determine cycle times, cell layout and longevity estimations.



