
A Palletizing Machine-Dual M-Stack
As an advanced industrial automation palletizer, the Dual M-Stack delivers reliable, high-speed palletizing across two product lines. This system is…
Read ArticleRandom robotic bin picking helps manufacturers automatically locate, pick, and place parts that arrive in totes, trays, wire baskets, or bulk bins without fixed orientation.
Motion Controls Robotics develops robotic random bin picking systems that combine robot reach, 3D vision, and application-specific end-of-arm tooling to improve throughput, reduce manual handling, and support more consistent downstream production.
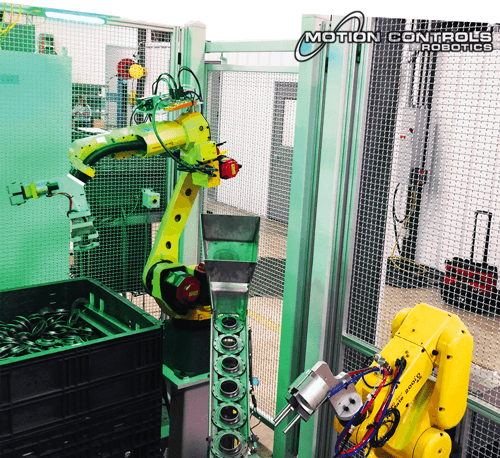
Random robotic bin picking is an automated process where a robot uses vision and motion planning to identify usable pick points on loosely arranged parts inside a container. Instead of requiring every part to be neatly staged, the system scans the bin, evaluates available picks, and removes parts one at a time for transfer into the next operation.
This approach is often used for machine tending, part presentation, assembly support, inspection flow, and material handling applications where parts arrive in bulk and need to be separated efficiently.
A successful random robotic bin picking system depends on more than a robot reaching into a bin. The application also needs reliable scanning, practical part presentation logic, collision avoidance, and tooling that matches the part’s size, shape, weight, and surface condition.

Use this area to show a random robotic bin picking application in action. A short video here works well for showing scan-to-pick motion, part variety, and final part placement.
Suggested use: 30 to 90 seconds with opening scan view, pick planning overlay, and final part transfer.

Parts are organized in defined positions, often making picking simpler and faster when presentation is consistent.
Parts have some order or separation, but still require vision and flexibility to manage variation inside the container.
Parts are bulk loaded with no fixed orientation, requiring 3D vision, motion planning, and smart gripping to achieve reliable picks.
These are some of the commonly used robots for bin picking. Click on the robot to learn more.
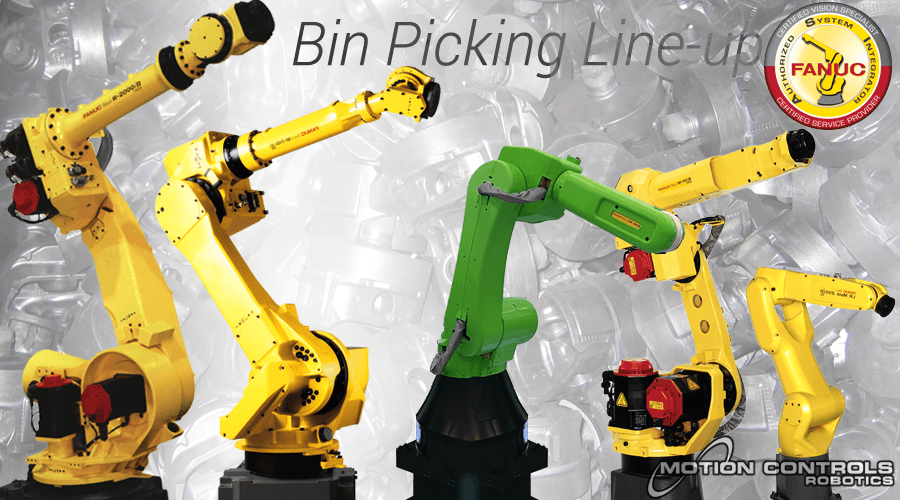
Click on each robot to view more information.
Whether your parts arrive loosely stacked, nested, or bulk loaded, Motion Controls Robotics can help evaluate the robot, vision, tooling, and part presentation strategy needed for a successful random robotic bin picking system.


