Loading Unloading Kitako-Shimada
– Load and unload tasks are a very popular application in robotics. In most cases, these jobs have higher levels of safety risks like repetitive motion injuries or burns from removing parts that are too hot. Kitako-Shimada machining cells are a very efficient way of accomplishing machining of parts and are very popular especially in the auto part industry. Kitako-Shimada machining cells can be loaded manually, with a robot, or gantry.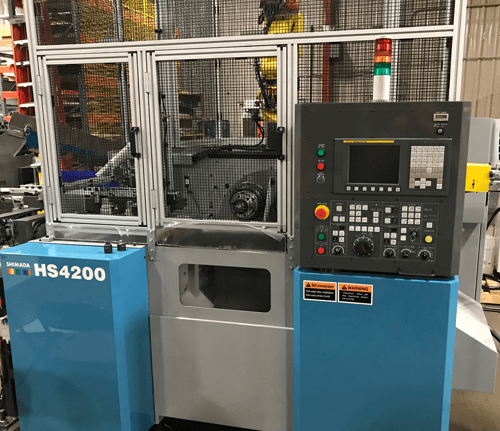

Customer Challenges – Loading Unloading Kitako-Shimada
The customer needed to be able to load and unload a Kitako-Shimada machining cell with various sizes of parts. It was also important, since the parts look very similar, to have vision to determine if the part on the infeed conveyor is the correct size for what was entered into the HMI for production. Kitako’s small footprints are designed to make the most of your available floor space.
![]()
Process Sequence – Loading Unloading Kitako-Shimada
This project required that the loading and unloading process use a robot to be able to meet specified rates and the placement precision needed for machining the parts. The customer selected a horizontal 4 spindle CNC Lathe developed by Kitako-Shimada.
-
- The operator sets up the system prior to operation via the robot teach pendant HMI for the specific part model being run.
- Parts are manually loaded into the bowl feeder. Parts feed from the bowl feeder to a conveyor that leads to the pick location by the robot. Here a part verification sensor verifies the part matches the part set-up on the HMI. If the part is not correct, the FANUC LR Mate places the part in the reject area.
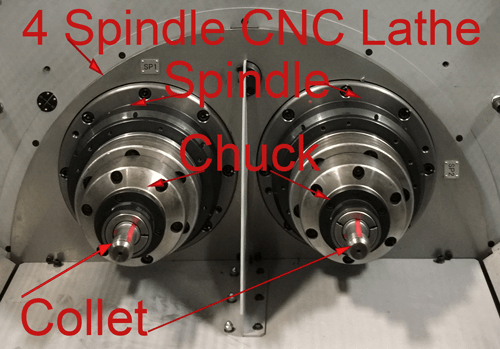
- If the part is correct, the LR Mate picks one part and shifts over to pick a second part. Once both parts are picked from the conveyor, the robot places them on the collets of the Kitako – Shimada machining center.
- The turning center rotates 180 degrees moving the placed part to the machining area where the part is trimmed to the proper dimensions. A coolant is applied during the machining. While these parts are being machined, the LR Mate loads two more parts on the spindles.
- The tool rotates back to the top and the finished parts are picked by the LR Mate from the spindles and placed on an exit conveyor.
Robot and End of Arm Tooling
Robot – LR Mate 200iD/7L
- Axis – 6-axis
- Payload – 7 KG
- Reach – 911mm
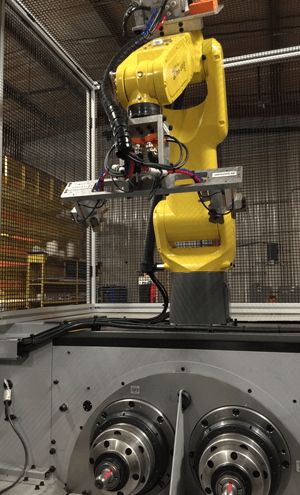
The long arm LR Mate 200iD/7L is a compact, vision-guided robot with six-axis movement which allows positioning and orientation on each axis. Handling Tool Software was added to the robot package to make precision placement of a variety of part sizes possible. This makes moving around inside the Kitako- Shimada from the infeed conveyor to spindles to exit conveyor possible in such a small footprint. The small R-30iB Mate Plus controller also aides in keeping the overall footprint of this machining center under the customer requirements.
The end of arm tooling is a dual gripper for quickly picking and placing two parts onto the collets on the spindles.
Safety Features
Motion Controls Robotics follows the RIA 15.06-2012 Safety Standard designed to make sure employees and robots work safely together. We take full advantage of new technologies and innovations available. This system is enclosed with doors on the Kitako-Shimada and the robot will not run if the doors are open.
![]()
Customer Results
With the small overall footprint, this Kitako-Shimada machining cell was a perfect fit for their facility. The feeder was easier to use than other feeders they had and did not get clogged up and the LR Mate made sure that rate was met.