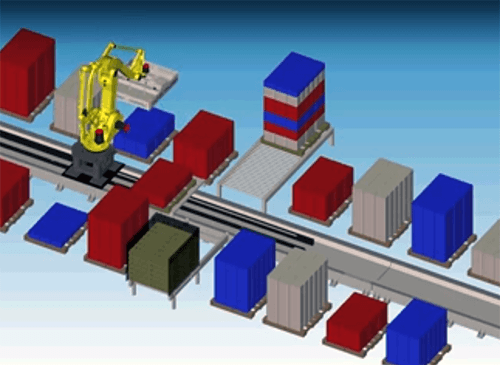
There is a small niche of robot applications where it makes great sense to mount the robot on a rail, providing an additional axis of motion to the robot and improving its reach/coverage. Tending multiple machines with a single robot and palletizing a high volume of product types (SKU’s) with relatively low production volume are examples of this category of robot applications.
There is a small niche of robot applications where it makes great sense to mount the robot on a rail, providing an additional axis of motion to the robot and improving its reach/coverage. Tending multiple machines with a single robot and palletizing a high volume of product types (SKU’s) with relatively low production volume are examples of this category of robot applications.

The robot controller is typically mounted at the end of the robot rail and connected to the robot through flex cables in applications such as this. But in some instances, it may make sense to actually mount the controller on the rail transfer unit, or RTU, adjacent to the robot.
When does a robot on rails need a traveling controller?
The most obvious situation is when the robot on rails is traveling more than the maximum cable distance recommended by the robot manufacturer. FANUC, for example, offers a maximum 30-meter length set of cables to run from a remote cabinet to the robot on rails. Any longer than this, and you run the risk of signal degradation and your high precision robot may fail to operate properly. So if you have a rail length and robot/controller configuration where a 30-meter cable won’t reach, your only solution is to mount the control cabinet on the RTU. Then, you can limit your extended cable runs to power and possibly Ethernet to communicate with a remote PLC which have maximum distances of hundreds of feet, well within the limit of known robot applications.
In other situations, it may be easier from an operational/functional perspective to mount the robot controller on the RTU, immediately adjacent to the robot. This could simplify operator interface, error recovery or diagnostics since the controller won’t be several meters away from the robot.
Why not always mount the controller on the rail transfer unit?
Mounting the control cabinet on the RTU can save cost regardless of the length of the rail. It will always be more economical to mount the cabinet on the rail even if the rail was only a few meters in length. The extension flex cable for power and Ethernet only will always be less expensive than extension flex cables for power, Ethernet, and robot controls. And, after millions of robot cycles, your flex cables will eventually need to be replaced. It will be far less expensive to replace power and Ethernet cables only, instead of power, Ethernet and robot control cabling.
The answer to this lies in the robot controller specifications. For the FANUC controller at least, there are vibration specifications that have been developed through rigorous testing. If you exceed these specifications, you may lose your factory warranty on the robot and worse still, the robot may not operate properly or reliably. FANUC, for example, rates the R-1000, R-2000, M-900 and M-410 family of robot controller cabinets for up to .5G (4.9m/sec2) vibration acceleration. And they recommend that you “consult with your FANUC sales representative…when using the robot in a location subject to serious vibration.” Consequently, the robot integrator or end user needs to verify that the robot cabinet will be exposed to no greater than .5 G of vibration acceleration.
Fortunately, companies like Gudel build smooth, precise rails that provide a very smooth running surface for the robot. And, simple measures such as adding isolation mounting can improve the likelihood of successfully mounting the robot controller with the robot on the RTU.
At the end of the day, your robot integrator needs to make a decision based on experience and predicted application conditions to determine if mounting the robot’s control cabinet on a rail makes sense for your robot application.
Contact Motion Controls Robotics, Inc. to learn more about what using robot on rails can do for your machine tending, palletizing, or other large footprint manufacturing, warehousing or order fulfillment operation.