
A Palletizing Machine-Dual M-Stack
As an advanced industrial automation palletizer, the Dual M-Stack delivers reliable, high-speed palletizing across two product lines. This system is…
Read Article
“ We were looking for highly capable company to partner with for a challenging part stacking automation project. We needed a company that could successfully take the lead and manage the project thru concept, design, procurement and launch. MCRI did a tremendous job in all phases of the project and their professionalism and attention to detail was evident throughout the project.“ ~Sauder Automation Specialist
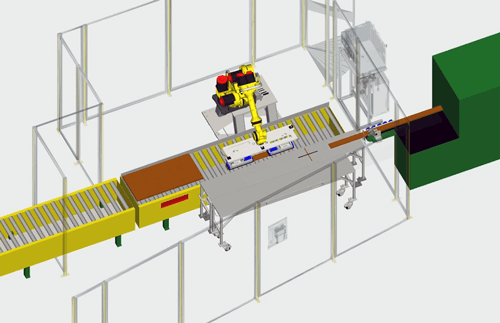
Sauder, a top ready-to-assemble furniture company out of Archibold, Ohio, came to Motion Controls Robotics to find a robotic solution for a part stacking operation. Their goal for automating was to improve the overall efficiency, quality, and safety of the process. Using a robot to stack parts means they can:
![]()
The product being stacked is planks of wood that have just left a bander. The banding connects the planks but is perforated at both ends of the boards. These planks are stacked based on part size. The company had five different stack patterns for the different size lengths and widths of product. Motion Controls Robotics selected the FANUC R-1000iA/80F as the best robot to integrate to accomplish the tasks at the rate required. The robot cell setup allows for up to 1,200 boards to be stacked in an hour. This meets the company’s goal for increased throughput.

Robot selection
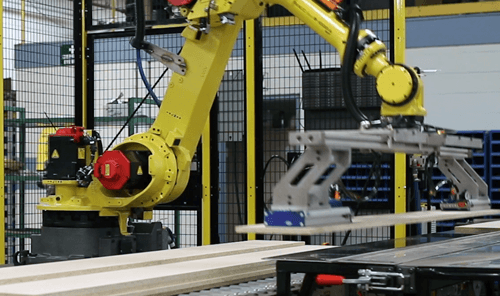
The robot integrated for this application is a FANUC R-1000iA/80F Robot with the R-30iB Plus controller. This six-axis robot uses HandlingTool software to move and stack product using the most efficient movements.
Models |
Payload |
Reach |
Download Spec Sheet |
| FANUC R-1000iA/80F | 80 kg/176 lbs. | 2230 mm/88 in | R-1000iA_80F.pdf |
Other uses for the FANUC R-1000 Robot
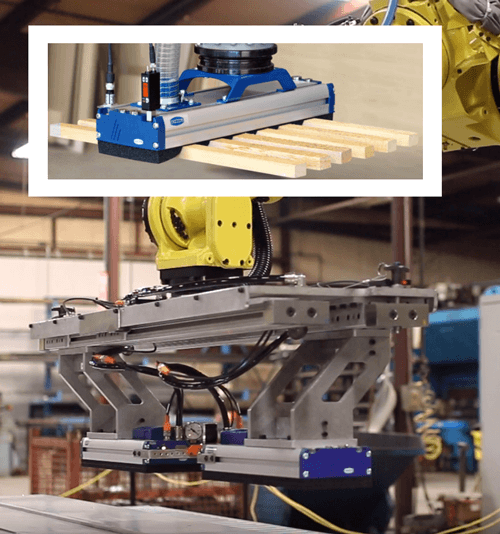
The end of arm tooling developed for stacking boards uses two Schmalz Vacuum grippers designed to pick wood products. The End of Arm Tooling is manually adjusted based on the dimensions of the wood.
Motion Controls Robotics follows the ANSI R15.06 Safety Standard designed to ensure employees and robots work safely together. We take full advantage of new safety technologies and innovations as they become available. This system is complete with safety fencing and sensors. There are times when the operators need to enter the area to work. Safety sensors ensure the robot will not run until all workers have left the cell.
![]()
As a result of these changes, the new system keeps the process running at a consistent and predictable rate throughout the three shifts.
If you have a similar application that consists of picking and placing product into stacks, contact us to find out how line tracking and sensing can be combined for your best solution.


