
A Palletizing Machine-Dual M-Stack
As an advanced industrial automation palletizer, the Dual M-Stack delivers reliable, high-speed palletizing across two product lines. This system is…
Read ArticleThis is the third of four articles covering the main types of grippers used in robotic applications. Remember that most times a custom designed EOAT will include multiple types of grippers to provide flexibility in the process.
Also in our gripper series:
Robotic End Effectors, Pneumatic or Servo Grippers, and other End of Arm Tooling (EOAT) are like the robot’s hands. They perform functions like material handling, pick & place, and machine loading/unloading.
Magnetic grippers come into play when the object being handled is made of ferrous material. Magnetic grippers can handle a variety of material sizes, grasp quickly, and allow easy grasping of a wide range of product shapes including items with holes. Considerations when using magnetic grippers include; items can slip slightly, dirt and grime can reduce lifting power, and metal particles (shavings) will also stick to gripper.
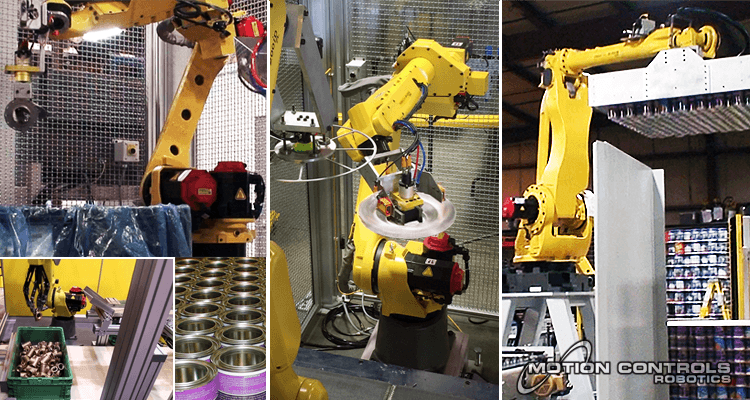
There are different types of magnetic grippers:
Magnetic grippers are used in a variety of industries where products or components contain ferrous metal. Latest applications of magnet grippers include material handling, palletizing, and bin picking of automobile parts and palletizing metal containers like paint and solvent cans and other steel containers.
Custom designed EOATs can combine multiple gripper types to bring more flexibility and versatility to the robot’s functions. These are typically referred to as “multi-grippers”. This is shown in the above video of the bin picking cell which combines a magnetic gripper with a mechanical gripper.
Other examples include:
If you think that a custom designed magnetic gripper would help increase the efficiency of your process, contact Motion Controls Robotics for an evaluation. If you currently use a magnetic gripper in your robotic system, we would love to see and share your experience. Fill out our contact form and we will share on MCRI’s Facebook page.


