
Thinking about integrating a robotic picking and packing operation to increase productivity? This article discusses the essential information needed for the best setup by exploring advantages, robot requirements, end of arm tooling needs, and simulation and programming software.
A robotic picking and packing application is defined as the picking of products and packing them into a case or tray. In most pick and pack operations, product is delivered from a primary packaging operation on a continuously moving conveyor and randomly ordered. In some instances, product may be pre-grouped, ready for multiple product picking/packing, and/or may be in segmented or riding on lugged conveyor so the product is in repeatable, uniformly spaced locations.
Robotic picking and packing solutions for secondary packaging are consistent, flexible, precise and fast. In today’s manufacturing environment, it is common to have 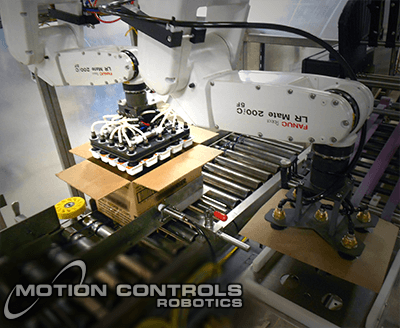 multiple product changes on a daily basis. Pick and pack applications can easily accommodate this by providing interchangeable tooling and multiple product recipes selected through a user-interface on the iPendant or a PC.
multiple product changes on a daily basis. Pick and pack applications can easily accommodate this by providing interchangeable tooling and multiple product recipes selected through a user-interface on the iPendant or a PC.
Primary advantages of selecting a robotic pick and pack application are:
- robot cells can take up very little floor space
- robots can do repetitive tasks saving employees from monotony and repetitive work injuries
- increased output at a significantly lower cost of production
FANUC Robots for Picking and Packing Applications
Click on robot to learn more

- LR Mate – This lighter payload robot line has capacity up to 15 pounds including end of arm tooling and includes food grade robot options and multiple mounting options (inverted, angle). LR Mates are also fast with up to 85 robot cycles per minute (CPM).
- M20iA or M10iA –Using the latest in intelligent technologies and allowing for
 easy integration, this series of robots allow for up to 25 CPM, a payload limit of 77 pounds including end of arm tooling, and multiple mounting options (inverted, angle). A hollow wrist version is available to minimize end of arm tool dressout requirements for the gripper.
easy integration, this series of robots allow for up to 25 CPM, a payload limit of 77 pounds including end of arm tooling, and multiple mounting options (inverted, angle). A hollow wrist version is available to minimize end of arm tool dressout requirements for the gripper. - M710iC –The M710 has a variety of models available for payloads up to 150 pounds including end of arm tooling and multiple mounting options. The M710 is perfect for lower throughput jobs that might change daily. MCRI uses this model in their
PakPal to both case pack and palletize product using one small footprint cell that can be easily moved to new locations in the facility. - M2iA & M3iA –These robots are designed for very high speed (up to 125 CPM), precision, and flexible movement in small/lightweight product (13 pounds) picking and placing. These models are available in both regular and food grade options with an IP67 rating which allows for dirty environments and cleaning options. Mounting options include inverted and angled mounting.
 easy integration, this series of robots allow for up to 25 CPM, a payload limit of 77 pounds including end of arm tooling, and multiple mounting options (inverted, angle). A hollow wrist version is available to minimize end of arm tool dressout requirements for the gripper.
easy integration, this series of robots allow for up to 25 CPM, a payload limit of 77 pounds including end of arm tooling, and multiple mounting options (inverted, angle). A hollow wrist version is available to minimize end of arm tool dressout requirements for the gripper.End of Arm Tooling (EOAT) Design
The end of arm tooling for pick and pack applications can be designed to pick one or multiple products at a time. Quickly interchangeable grippers can also help increase the number of products that can be picked and packed by a robot cell. 
The majority of tooling designed for pick and pack applications uses lightweight vacuum cups. When selecting the vacuum supply it is important to start with the desired rate. The speed a product needs to move plays an important role in vacuum and gripper selection and design. 
Although some applications may use a mechanical gripper or multi-product gripper for higher throughput, it is important to keep the EOAT as light as possible for smooth, fast movement.
Other tips for eliminating future issues and getting a well-designed EOAT for all pick and pack applications needs include:
- Incorporate a “pointer” mounting into the EOAT; the pointer is installed on the EOAT by a programmer or maintenance technician to teach robot positions to achieve best tracking accuracy
- Evaluate all products to be picked and packed, looking for uneven weighting and surfaces
- Keep in mind different products and design the EOAT to be flexible enough for all jobs. Or, decide on interchangeable grippers.
Software and Technologies
FANUC offers useful technologies for specializing and perfecting the robotic pick and pack application:
iRVision includes a 2D robot guidance tool to accomplish color sorting, barcode reading, part location, error proofing, and other operations that normally require special sensors or custom fixtures.
iRPickPRO simulation is a tool used for showing results in change of configurations of infeed conveyor or product placement to verify and/or test robot movement, rate requirements, and discover best application efficiency.
iRPickTool Software simplifies the setup for line-tracking for picking parts from the conveyor. If the system is to contain more than one robot this software can help model the appropriate pick priority and task for each robot to balance the work load.
MCRI is experienced with all of these technologies and tools for designing the perfect robotic picking and packing cell application. We would be happy to help you tackle your next packaging project. Contact us to setup an appointment or to learn more – Robotic Request for Information Form