
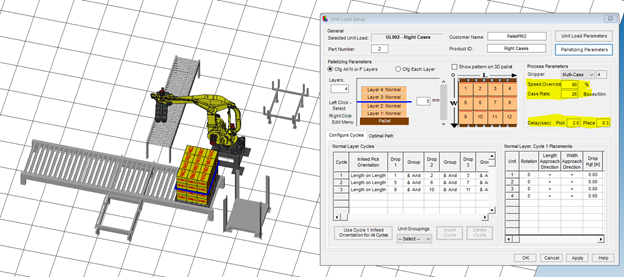
Why prove out your robotic cell/system with ROBOGUIDE robot simulations? Ensuring your robotic systems operate flawlessly is paramount and robot simulations offer a powerful tool to visualize and perfect robotic operations before they hit the production floor.
Here you will discover six essential features of robot simulations that drive efficiency and precision, explaining aspects you may not have considered.
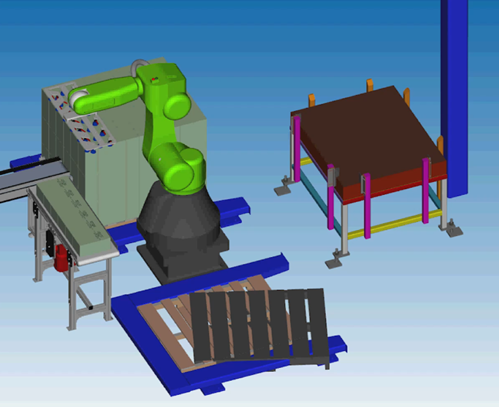
FANUC’s ROBOGUIDE simulates applications for Palletizing, Packaging and Load/Unload.
FANUC simulation software preloads all their robot series/model information, so that very in depth and specific information can be input and analyzed using a simulation run. A run can check for reach, rate, cycle times, duty, and allows you to visualize the process for debug and other questions.
ROBOGUIDE allows us to develop, program and simulate each customer’s custom robotic cell to optimize the process and unveil improvements that could be made to the system. There are 4 ROBOGUIDE Platforms:
- PalletPRO and PalletTool
- WeldPRO
- HandlingPRO
- PaintPRO

Next let’s look a little closer at how each of these aspects help in selecting the best robot, cell setup, and space needs.
6 Features of Robot Simulations
1. Visualize the Process
For instance, maybe top of your needs list is to show the people on your team how the robot system is going to look and work. A simulation allows co-workers and management to visualize the process. It always helps to be able to actually see the robot system at work.
While we understand there are a variety of simulations programs available, we use FANUC’s 2D and 3D packages for the most accurate results.
2. Accurate Cycle Rates
Learn from the simulation if the selected robot and setup can meet the rates you need. This information allows you to determine if the system will meet current production goals. For some companies, it can also help answer whether there is the ability to add production in the future. Upgrading the robot model might sometimes be worth the extra cost if it allows for a higher product count per minute.
3. Reach Capabilities
Verify the robot can reach all locations of products or processes. One example for this was an end of line palletizing system. They selected a collaborative robot because the system was for special orders. As a result, the rate and speed needed were slower. We setup the system and ran a simulation. We quickly realized we needed to register the pallet location differently based on the robot’s reach and path.
4. Floorspace – Safety Distance and Vertical Clearance Verification
Running the simulation can verify the robot does not infringe on safety distances needed to keep operators safe. It will also define boundaries so you will know if the robot might hit any overhead obstacles (AC Unit, I-Beams, Piping, or Utilities).
Integration testing ensures that all parts of the robotic system work seamlessly together. Robot simulations can model the entire production line, identifying and resolving integration issues before they cause costly delays. It’s like having a test run without risking your actual production schedule.
5. Robot Duty Cycle
How long will each axis last under maximum workload criteria? Data for the system is input after running the simulation and a chart showing each axis is displayed. Here you can see that the J1 axis has a life of 4.2 years. Compared to the other 5, this denotes an issue that needs addressed.
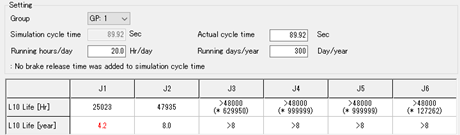
It is important to remember that this chart assumes proper maintenance and care of the robot. It is always a good reminder to say that Emergency stops are not the proper way to stop the system and do cause damage if used too often. They should only be used as a stop in an actual emergency.
Read more about Emergency Stops
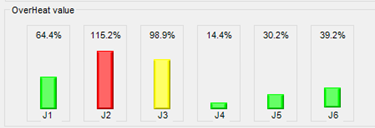
Similarly, you are able to see the chance the axis may overheat.
6. Do A/B Testing
Doing two robot simulations and comparing the results can help you determine which setup for the system runs better and has better results?
Is it better to do a Pick/Pick with a ‘dual’ tool or will picking single parts be just as good?
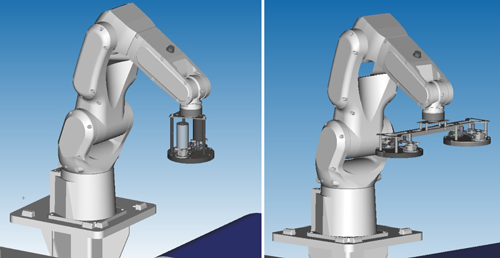
For instance, we did a simulation with a Dual Gripper for a simple application of picking a single product or picking two then placing and found some definite Pros and Cons.
Pros
- When picking 2 in succession it allows for a longer ‘Vacuum On’ delay (time to grab the part) because you save time on the place (robot would place both at the same time)
- Higher Rates
Cons
- Cost – the end of arm tooling is twice as expensive
- Maintenance (more to clean)
- Potential overkill because the customer may never need\be able to utilize the added speed of dual grippers
The Robot Simulation Takeaway
The simulation proved that if the customer wants to increase the system’s current rate there is growth opportunity by adding the dual gripper at a later date (pick two place both at the same time).
**Here is one extra feature that may be useful to some companies.
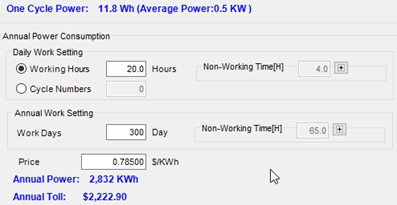
Energy Usage
How much energy can you expect the robot to use under planned workload. Many companies that have sustainability drivers can see if this system is an improvement over current need or falls into an acceptable range based on current sustainability goals.
Robot simulations are an indispensable tool in modern manufacturing, offering a blend of visualization, optimization, and testing. By harnessing all these features, you can ensure your robotic systems are primed for peak performance, driving efficiency and reducing risks.
In conclusion, robot simulations are a great way to get any robotic system project started because they can answer questions and by visualizing the process, you might think of issues that you would have missed otherwise.
Robot Simulation Types
Basic Robot Simulations
Basic Simulations show one FANUC Robot Model picking and placing product (general shape of product is matched) based on an AutoCAD layout. A basic simulation will show the path (no end of arm tooling), process, cycle time, reach, and rate.
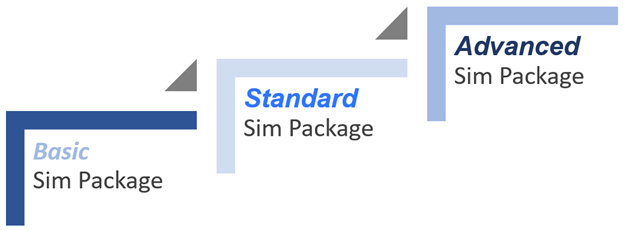
Standard Robot Simulations
Standard simulation can include 2 robots and are also setup based on an AutoCAD layout. The benefit of the standard simulation is that solid models can be added from customer files to make setup more specific. The system will also include the End of Arm Tooling. Including these items determines moves to test reach and throughput in a more detailed fashion. You will receive a detailed report of the simulation’s findings. This report will include the items listed above.
Advanced Robot Simulations
Advanced Simulation Package includes a system layout using AutoCAD layout that included up to 5 robots. Solid models will define the end of arm tooling, conveyors, product (customer supplied), and any auxiliary machinery that might affect the total cycle time. The main difference in the Advanced Simulation is you will also receive a 3D Sim that you can view from all angels. Complete RoboGuide write up report with charts and detailed analysis of robot performance are available to review.