
A Palletizing Machine-Dual M-Stack
As an advanced industrial automation palletizer, the Dual M-Stack delivers reliable, high-speed palletizing across two product lines. This system is…
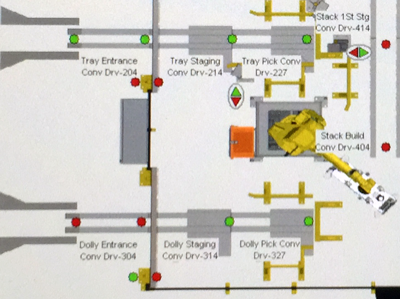
Read ArticleMotion Controls Robotics’ latest integration project is a small footprint robotic cell designed for plastic jug palletizing. Two different FANUC robot models share the cell and work together to palletize the gallon jugs and move new trays and dollies onto the outfeed conveyor.
![]()

A leading dairy producer came to MCRI to work with us to develop a robot palletizing cell for plastic gallon jugs. Their end customer required new shipping packaging that, in turn, required a new palletizing system. Another goal of the project was to reduce overall labor in the packaging room where workers routinely work in near zero temperatures.
The issues that MCRI had to address were being able to connect to the current flow of the product and making sure that rate and stack quality improved while keeping the same flexibility in stack patterns with the various dollies and trays.
The amount of work required in the palletizing cell couldn’t be achieved with a single robot. A second robot was introduced to share the workload of jug handling, intermediate tray handling, and dolly handling. This way the robots can work simultaneously to complete the process. With MCRI’s highly advanced collision avoidance logic, programing allows the robots to move through the same spaces in very tight time intervals with no risk of collision. The two robots selected for this robot cell are the FANUC M410iC/185 for palletizing the milk jugs and the FANUC M710iC/50 for moving dunnage within the robot cell.
This setup combined with an efficient end of arm tool design, for the dunnage handling robot, made it possible to meet the company’s required palletizing rate.

![]()
![]()
For this integration project, two robots worked together: a M410iC/185 for palletizing and FANUC M710iC/50 for handling dunnage. They use an R-30iB Plus controller and haptic teach pendant. The M710’s EOAT uses two, controlled cylinders to grip the dollies and the trays individually. The gallon jug palletizing robot’s end of arm tooling was fabricated using a proprietary 3D printing process. The grippers hold the jugs firmly, allowing rapid accel and decel of the jugs to the palletizing station. The gripper has sensors to notice if a jug is missing or has been dropped.
Models |
Payload |
Reach |
Download Spec Sheet |
| Floor Mounted | |||
| M410iC/185 | 185 kg | 3140 mm | M-410iC-185.pdf |
| M710iC/50 | 50 KG | 2050 mm | FANUC M710 Various Models |
Motion Controls Robotics follows the ANSI R15.06 Safety Standard designed to ensure employees and robots work safely together. We take full advantage of new safety technologies and innovations as they become available. This system is complete with safety fencing, light curtains, and sensors.
Light curtains are placed on the infeed station to allow an operator to push dollies into conveyor opening. The light curtains prevent random entry into the cell but allow dollies to be added to the process when needed. The operator requests access just before inserting the dolly into the palletizing cell. The light curtain at the full stack outfeed station allows the operator to push the finished stack out of the robot cell.
![]()
The system was recently installed and is running at the facility. The new system maintains the end customer’s required production rate, with smooth, reliable operation. A second near identical system was installed at a sister plant and is running as well.


